Humanoid TEO by sa mohol používať v zdravotníctve, ale aj pri opravách v potrubiach.
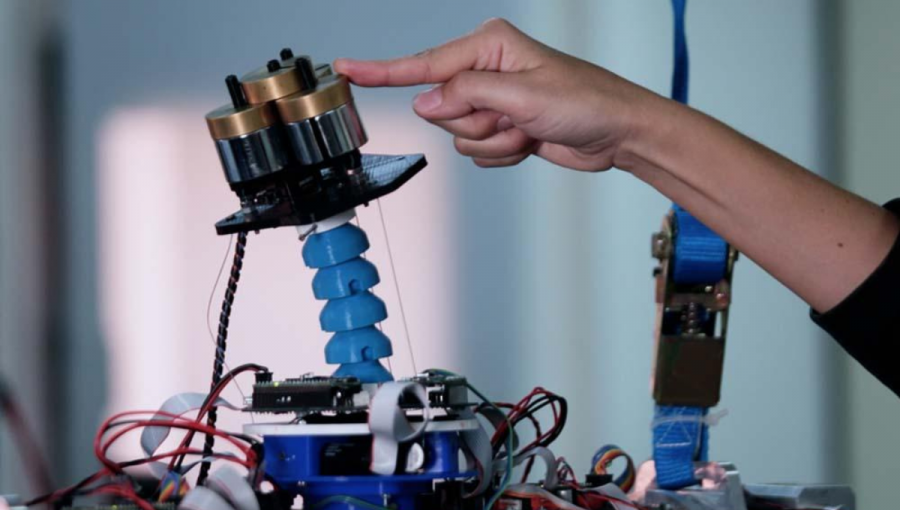
Model prototypu mäkkého elastického kĺbu od vedeckého tímu UC3M RoboticsLab. Zdroj: UC3M
Výskumný tím UC3M RoboticsLab z Univerzity Karla III. v Madride (UC3M) sa v rámci projektu SOFÍA usiluje zlepšiť vzťah medzi humanoidnými robotmi a ľuďmi. Vyvinul preto robotické kĺby, ktoré umožnia humaoidom väčšiu ohybnosť, stabilitu, ale aj všestrannejšie použitie. Zároveň by vďaka tomu mali byť odolnejšie proti poškodeniu.
Nové robotické kĺby pripomínajúce šľachy sú z mäkkého vysokodeformovateľného materiálu, ktorý sa dá spájať pomocou vlákna. (Šľachy sú tvrdé vláknité tkanivá, ktoré pomáhajú v pohybe kostiam alebo napríklad očným buľvám – pozn. red.) Tým pádom sú mobilnejšie a všestrannejšie ako v súčasnosti používané tuhé spoje.

Robot elastický ako červ
„Ak by sme chceli poslať robota napríklad do potrubia, zasekol by sa v ňom. Ale s robotom, ktorý je elastický ako červ, by to bolo bezpečnejšie, flexibilnejšie a dal by sa použiť všestrannejším spôsobom,“ hovorí Concha Monje, lektorka oddelenia systémového inžinierstva a automatizácie UC3M a vedúca výskumníčka projektu SOFÍA.
Výskumný tím vyvinul aj inteligentné ovládače, ktoré umožnia mäkkým kĺbom zvládnuť dvíhanie rôzne ťažkých predmetov. Odhadnú ich váhu a zabezpečia, aby si ich robot umiestnil tak, že sa kĺb neroztrhne.
Keďže sa takíto roboti pohybujú bezpečnejšie a ľahšie, mohli by nájsť uplatnenie v zdravotníctve napríklad ako asistenti ľudí, ktorí potrebujú pomoc pri vykonávaní určitých úloh.

Pohyblivosť zlepšujú aj japonské skladačky z papiera
V rámci tohto výskumu boli vyvinuté tiež spoje v štýle origami (staré japonské umenie skladania papiera – pozn. red.). Vedci na to použili acetátové a uhlíkové nanovláknové senzory. „Existuje inovatívny rad zaoberajúci sa origami, ktoré umožňujú pohyblivosť samotného kĺbu,“ hovorí Concha Monje.
Všetky tieto pokroky tím UC3M RoboticsLab použije pri zostavení humanoidného robota TEO, ktorý už má mäkký kĺb podobný krku. „Očakáva sa, že mäkká robotika bude mať priamy vplyv na vývoj robotov. Je už realitou, že malé a stredné medzinárodné spoločnosti investujú do komercializácie a rozvoja tohto typu robotiky a ich záujem bude pravdepodobne rásť,“ uzatvára výskumníčka.
Zdroj: Universidad Carlos III de Madrid
(GL)