Drsný terén červenej planéty by mal zvládnuť ľahšie ako súčasné rovery.
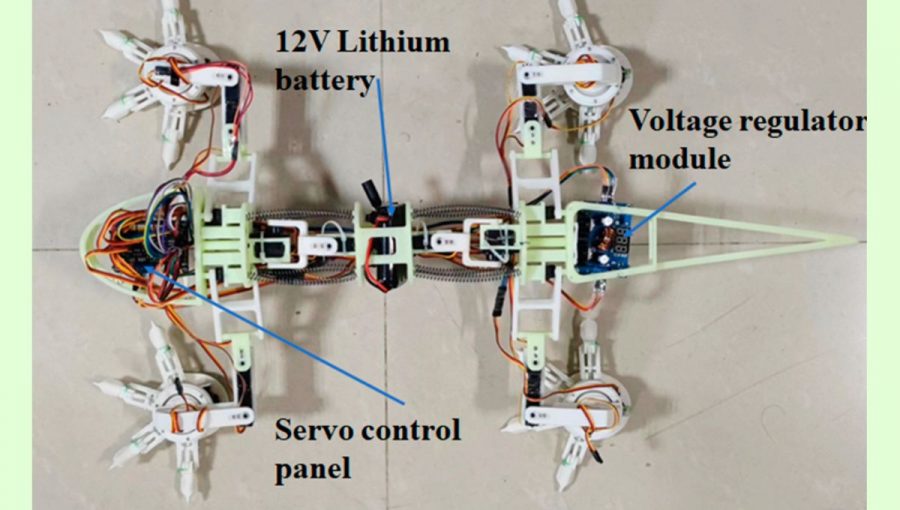
Robotická jašterica vyvíjaná pre prieskum povrchu Marsu. Zdroj: Tech Xplore/Chen et al (MDPI, 2023)
Výskumníci z Nanjingskej univerzity letectva a astronautiky v čínskom meste Nanjing predstavili v časopise MDPI Biomimetics svojho štvornohého robota, ktorý by mohol pomôcť pri prieskume povrchu Marsu. Pri jeho tvorbe sa inšpirovali jaštericami.
Upozorňuje na to portál Tech Xplore, ktorý zároveň vysvetľuje, že súčasné rovery môžu mať na červenej planéte s pohybom problémy. Jej povrch totiž pokrýva aj hrubozrnná pôda a rôzne veľké horniny vrátane skál. No štvornohý robotický plaz inšpirovaný pohybmi púštnej jašterice by si s takýmto terénom mal vedieť poradiť.
Pozrite si
Prototyp robotickej jašterice je zo živicových súčiastok vytlačených pomocou 3D tlačiarne. Skladá sa z flexibilnej štruktúry podobnej chrbtici a štyroch nôh. Na každej nohe má dva pánty a ozubené koleso, ktoré vyvoláva hojdanie – vďaka tomu dokáže napodobniť plazivý pohyb typický pre ozajstné jašterice. Každá noha má aktívny členok, okrúhlu podložku a štyri flexibilné „prsty“ z dvoch pántov a pazúrika, ktorými sa dokáže udržať na hrudkovitej pôde aj skalách.
Chrbticu s nohami robota spájajú bedrové kĺby, pričom každý pozostáva z dvoch serv a štvorspojkového mechanizmu. Ten umožňuje robotovi zdvihnúť sa bez toho, aby stratil rovnováhu.
Pomáha im aj strojové učenie
Výskumníci riadia jeho pohyb pomocou ovládacieho panela, lítiovej batérie a ďalších elektronických komponentov.
Vedci vytvorili pre každý komponent svojho robota niekoľko kinematických modelov, aby dokázali napodobniť špecifické pohyby jašteríc. Pohyb robota potom plánovali na základe týchto modelov a numerických výpočtov.
Predtým, ako začnú výskumníci robotickú jaštericu testovať v teréne, musia ešte vyvinúť tesniacu štruktúru, ktorá ju ochráni pred marťanskou pôdou alebo lietajúcim prachom, a postaviť ju z odolnejších materiálov. Momentálne pracujú na modeloch strojového učenia, ktoré by jej umožnili prispôsobiť svoje pohyby rôznym terénom. Okrem toho plánujú zaviesť systém, ktorý by zabezpečil nepretržité napájanie robota.
Zdroj: Tech Xplore, DOI: 10.3390/biomimetics8010044