Ľudský hmat dosiahne ďalej, než sme si dosiaľ mysleli. Dokáže vycítiť aj predmety skryté v piesku.

Ilustračný obrázok. Zdroj: iStockphotos.com. Autor: krblokhin
Štúdia výskumníkov z Queen Mary University of London a University College London zistila, že ľudia majú formu vzdialeného hmatu, čiže schopnosť vnímať objekty bez priameho kontaktu, čo je zmysel, ktorý majú aj niektoré zvieratá.
Ľudský hmat sa zvyčajne chápe ako proximálny zmysel, obmedzený na to, čoho sa fyzicky priamo dotýkame. Nedávne zistenia v oblasti senzorických systémov zvierat však tento názor spochybnili.
Niektoré pobrežné vtáky, ako sú kalužiačiky a kulíky, používajú formu „vzdialeného hmatu“ na detekciu koristi skrytej pod pieskom. Vzdialený hmat umožňuje detekciu objektov schovaných pod zrnitými materiálmi prostredníctvom jemných mechanických signálov prenášaných médiom, keď sa v blízkosti vyvíja pohyblivý tlak.
Ľudia hľadali kocku pod pieskom
Štúdia na Medzinárodnej konferencii IEEE o rozvoji a vzdelávaní (ICDL) skúmala, či ľudia majú podobnú schopnosť. Účastníci jemne posúvali prsty cez piesok, aby našli skrytú kocku pred tým, než sa jej fyzicky dotkli.
Výsledky prekvapujúco ukázali, že ľudia majú porovnateľnú schopnosť vnímania ako pobrežné vtáky napriek tomu, že nemajú špecializované zobáky, ktoré tento zmysel vtákom umožňujú. Ľudské ruky majú teda väčšiu citlivosť, ako sa očakávalo.
Modelovaním fyzikálnych aspektov tohto javu štúdia zistila, že ľudské ruky sú pozoruhodne citlivé a detegujú prítomnosť zakopaných predmetov vnímaním nepatrných posunov v piesku, ktorý ich obklopuje. Táto citlivosť sa približuje teoretickej fyzikálnej hranici toho, čo je možné zachytiť z mechanických odrazov v zrnitom materiáli, keď sa pohyb piesku odrazí od stabilného povrchu, teda od skrytého objektu.
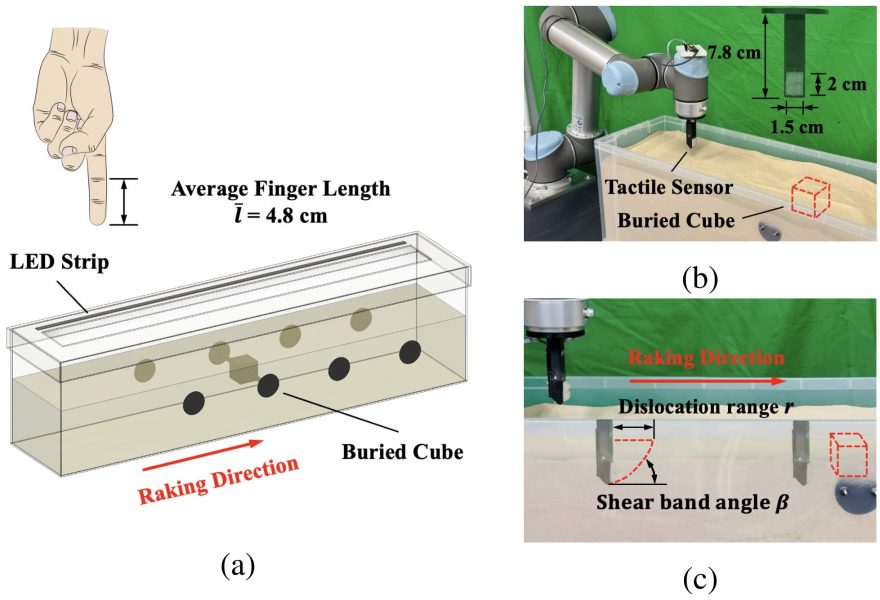
Prehľad experimentov na hmatovú detekciu v piesku s použitím ľudského účastníka a robotického ramena UR5 s hmatovým senzorom, pri ktorých sa zisťovala poloha kocky ukrytej v granulovanom materiáli. Zdroj: Queen Mary University of London
Človek verzus robot
Pri porovnaní ľudského výkonu s robotickým hmatovým senzorom trénovaným pomocou algoritmu Long Short-Term Memory (LSTM) ľudia dosiahli pôsobivú presnosť 70,7 percenta v rámci očakávaného detegovateľného rozsahu. Je zaujímavé, že robot dokázal snímať predmety z mierne väčších vzdialeností, ale často produkoval falošne pozitívne výsledky, čo preukázalo iba 40-percentnú celkovú presnosť.
Ľudia aj roboty dosiahli úroveň veľmi blízku maximálnej citlivosti predpovedanej fyzikálnymi modelmi a posunom.

Prínos štúdie
Tento výskum odhaľuje, že ľudia dokážu detegovať predmety zakopané v piesku, čím rozširuje naše chápanie toho, ako ďaleko dokáže hmat siahať. Poskytuje kvantitatívne dôkazy o hmatovej zručnosti, ktorá u ľudí doteraz nebola zdokumentovaná.
Zistenia ponúkajú cenné referenčné hodnoty na zlepšenie asistenčných technológií a robotického hmatového snímania. Použitím ľudského vnímania ako modelu môžu inžinieri navrhnúť robotické systémy, ktoré integrujú prirodzenú citlivosť na hmat pre aplikácie v reálnom svete, ako je sondovanie, výkopové práce alebo vyhľadávacie úlohy, kde je zrak obmedzený.
Podľa autoriek a autorov štúdie by tieto poznatky mohli viesť k vývoju pokročilých robotov schopných vykonávať jemné operácie, ako je napríklad lokalizácia archeologických artefaktov bez poškodenia alebo prieskum piesočnatých alebo zrnitých terénov, ako je marťanská pôda alebo oceánske dno. V širšom zmysle tento výskum dláždi cestu pre dotykové systémy, ktoré robia skrytý alebo nebezpečný prieskum bezpečnejším, inteligentnejším a efektívnejším.
(LDS)