

Prednáška: Teach-and-repeat – visuální navigace
Prednáša: Tomáš Krajník
6. 2. 2019, 17:30 – 19:00
Fablab Slovensko, Ilkovičova 8, 841 04 Bratislava, Slovakia
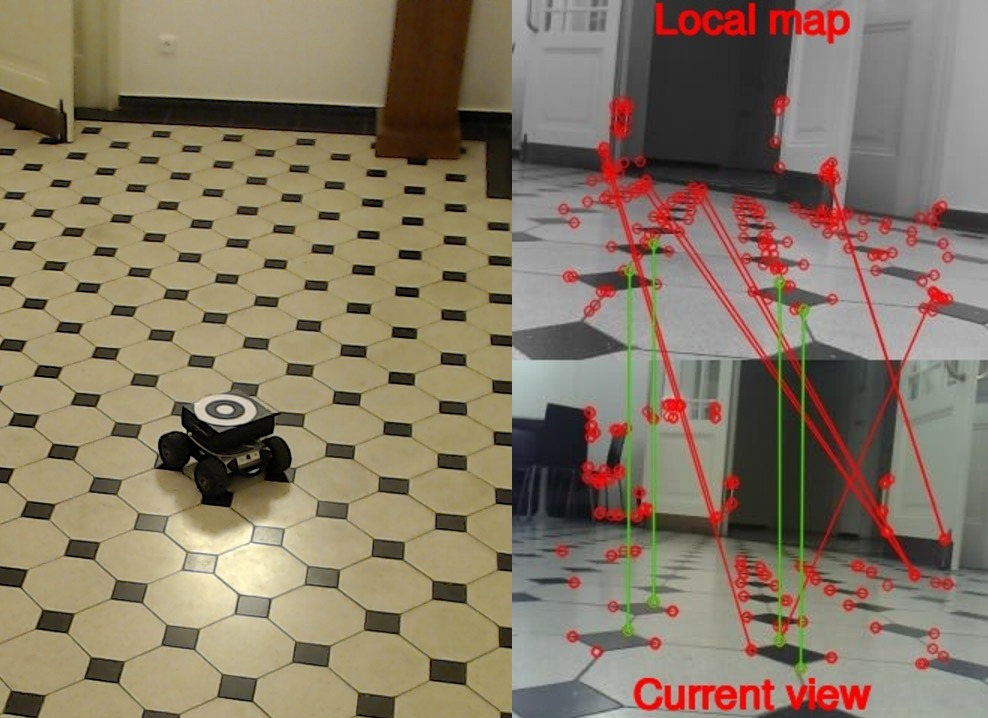
Ako naučiť robota navigovať po predvedenej trase pomocou vizuálnej navigácie.
 Hlavnou oblasťou záujmu Tomáša Krajníka (ČVUT Praha) je mobilná robotika a to najmä ich navigácia v premenlivom prostredí. Je autorom robustného vizuálneho navigačného algoritmu pre autonómne pozemné a lietajúce stroje v exteriéri nezávislý od zmien počas ročných období. Jeho algoritmy boli implementované v knižniciach pre vizuálne sledovanie a používajú ich aj v NASA, EPFL, KIT, AIT atď. Spolupracuje s niekoľkými výskumnými inštitúciami po celom svete, svoje výsledky prezentoval okrem iného aj na MIT, UPENN a na Oxforde.
Hlavnou oblasťou záujmu Tomáša Krajníka (ČVUT Praha) je mobilná robotika a to najmä ich navigácia v premenlivom prostredí. Je autorom robustného vizuálneho navigačného algoritmu pre autonómne pozemné a lietajúce stroje v exteriéri nezávislý od zmien počas ročných období. Jeho algoritmy boli implementované v knižniciach pre vizuálne sledovanie a používajú ich aj v NASA, EPFL, KIT, AIT atď. Spolupracuje s niekoľkými výskumnými inštitúciami po celom svete, svoje výsledky prezentoval okrem iného aj na MIT, UPENN a na Oxforde.
Vstup voľný.